0 محصولات
نمایش سبد خرید
اموزش راه اندازی سنسور ژیروسکوپ و شتاب سنج MPU6050 و LSM6DS3 با میکروکنترلر STM32
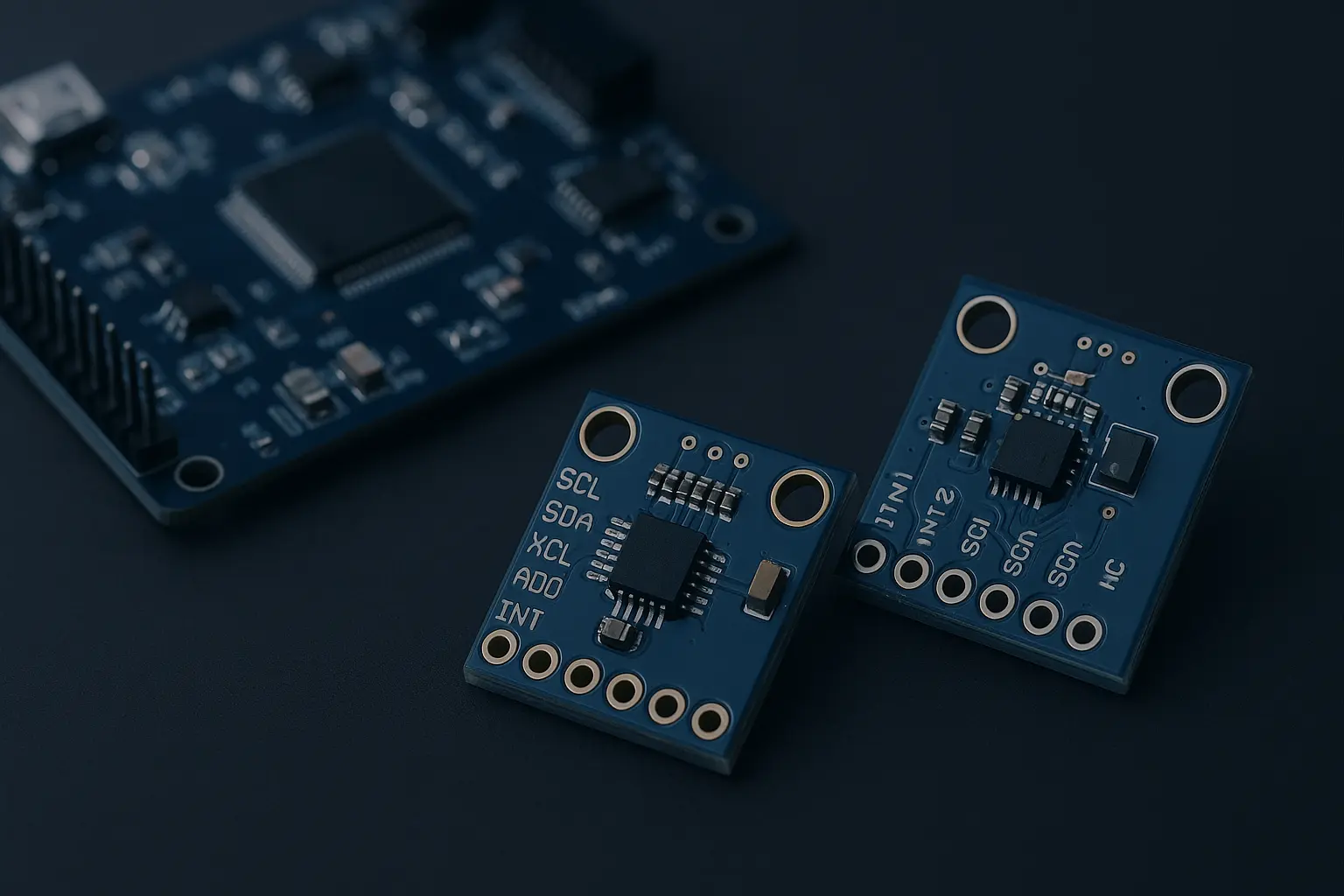
اموزش راه اندازی سنسور ژیروسکوپ و شتاب سنج MPU6050 و LSM6DS3 با میکروکنترلر STM32 ، آیا تاکنون به این فکر کردهاید که چگونه یک پهپاد تعادلش را حفظ میکند؟ یا چگونه ساعت هوشمند شما تعداد قدمهایتان را میشمارد؟ پاسخ در قلب کوچک اما قدرتمندی نهفته است: سنسورهای حرکتی مانند MPU6050 و LSM6DS3. این سنسورها با ثبت شتاب و چرخش، اطلاعات کلیدی برای موقعیتیابی، حرکت و جهتیابی را فراهم میکنند. در این مقاله، گامبهگام و همراه با مثالهای عملی یاد میگیریم چگونه این سنسورها را با میکروکنترلر STM32 راهاندازی کرده و از دادههای آنها استفاده کنیم.
بخش اول: چرا STM32؟
STM32 نهتنها یکی از محبوبترین خانوادههای میکروکنترلر در دنیاست، بلکه برای کار با سنسورهای حرکتی نیز ایدهآل است. دلایل این انتخاب:
- پشتیبانی کامل از پروتکلهای I2C و SPI
- توان پردازش بالا برای فیلتر و پردازش بلادرنگ دادهها
- کتابخانههای آماده مثل STM32Cube HAL برای توسعه سریع
- مصرف پایین انرژی در مدلهای L سری برای کاربردهای پوشیدنی
بخش دوم: مقایسه سنسورهای MPU6050 و LSM6DS3
هر دو سنسور از نوع IMU (واحد اندازهگیری اینرسی) ششمحوره هستند، اما ویژگیهایی دارند که انتخاب بین آنها را بسته به پروژه متفاوت میکند.
| ویژگی | MPU6050 | LSM6DS3 |
|---|---|---|
| ارتباط | I2C/SPI | I2C/SPI |
| دقت | معمولی | بالا |
| مصرف انرژی | بیشتر | کمتر |
| نرخ نمونهبرداری | تا 1kHz | تا 6.6kHz |
| مناسب برای | پروژههای آموزشی | پروژههای صنعتی و پیشرفته |
MPU6050 محبوبترین گزینه در آموزشهاست، در حالیکه LSM6DS3 در پروژههای پوشیدنی یا سیستمهای دقیقتر کاربرد دارد.
بخش سوم: اتصالات سختافزاری
برای راهاندازی هر دو سنسور، به پیکربندی صحیح سختافزار نیاز داریم.
اتصال MPU6050:
- VCC به 3.3V یا 5V (بسته به ماژول)
- GND به GND
- SDA به پین SDA در STM32 (مثلاً PB7)
- SCL به پین SCL در STM32 (مثلاً PB6)
اتصال LSM6DS3:
- VIN به 3.3V
- GND به GND
- SDA به SDA
- SCL به SCL
نکته مهم: حتماً از مقاومتهای پولآپ (pull-up) برای خطهای SDA و SCL استفاده کنید اگر ماژول آنها را ندارد.
بخش چهارم: پیکربندی STM32 با STM32CubeMX
- انتخاب میکروکنترلر یا برد (مثلاً Nucleo-F103RB یا STM32F401RE)
- فعالسازی I2C1
- فعالسازی USART برای نمایش داده در ترمینال سریال
- تنظیم فرکانس کلاک و تولید کد پروژه
بخش پنجم: خواندن دادهها از MPU6050
MPU6050 دارای رجیسترهایی است که اطلاعات شتاب و ژیروسکوپ را ذخیره میکند. برای خواندن:
- آدرس I2C سنسور معمولاً 0x68 است.
- رجیسترهای مربوط به شتاب از 0x3B شروع میشوند.
- مثال کد خواندن:
uint8_t data[6];
int16_t acc_x;
HAL_I2C_Mem_Read(&hi2c1, 0xD0, 0x3B, 1, data, 6, 100);
acc_x = (int16_t)(data[0] << 8 | data[1]);
float acc_g = acc_x / 16384.0f;
- داده را با UART ارسال کنید:
printf("Acc_X = %.2f g\r\n", acc_g);
بخش ششم: خواندن دادهها از LSM6DS3
آدرس پیشفرض I2C این سنسور 0x6A است. ابتدا باید رجیسترهای کنترل را مقداردهی اولیه کنید:
uint8_t ctrl1_val = 0x60; // 104 Hz, 2g
HAL_I2C_Mem_Write(&hi2c1, 0xD4, 0x10, 1, &ctrl1_val, 1, 100);
سپس دادههای ژیروسکوپ را بخوانید:
uint8_t buffer[6];
HAL_I2C_Mem_Read(&hi2c1, 0xD4, 0x22, 1, buffer, 6, 100);
int16_t gyro_x = (int16_t)(buffer[1] << 8 | buffer[0]);
float dps = gyro_x * 0.035f; // بستگی به تنظیم حساسیت دارد
بخش هفتم: فیلتر دادهها و استخراج اطلاعات مفید
دادههای خام، نویزی هستند. برای صافسازی و استخراج زاویهها میتوان از:
- فیلتر مکمل
- فیلتر کالمن
استفاده کرد.
مثال فیلتر مکمل برای محاسبه زاویه:
angle = 0.96 * (angle + gyro_rate * dt) + 0.04 * accel_angle;
بخش هشتم: نمایش دادهها و تست پروژه
برای نمایش دادهها از UART و نرمافزارهایی مانند TeraTerm یا Serial Plotter آردوینو استفاده کنید. دادهها را در زمان واقعی مشاهده کرده و با حرکت برد آنها را تست کنید.
مثال عملی:
اگر زاویه بیش از 30 درجه خم شد، یک LED روشن شود:
if(angle > 30.0f) {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);
} else {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
}
بخش نهم: نکات مهم در راهاندازی سنسورها
- از کابلهای کوتاه برای کاهش نویز استفاده کنید
- نرخ نمونهبرداری را بر اساس نیاز پروژه انتخاب کنید (مثلاً 100Hz برای ربات تعادلی)
- در صورت نیاز از وقفه (Interrupt) برای خواندن سریعتر استفاده کنید
- مقداردهی اولیه سنسور (Init) را با دقت انجام دهید تا دادهها صحیح باشند
- دقت کنید در پروژههای صنعتی باید سنسورها بهصورت دورهای کالیبره شوند
سوالات متداول (FAQ)
- کدام سنسور برای شروع بهتر است؟
MPU6050 به دلیل سادهتر بودن و منابع آموزشی بیشتر، گزینه مناسبی برای شروع است. - آیا میتوان هر دو سنسور را همزمان استفاده کرد؟
بله، اگر از آدرسهای متفاوت یا رابطهای جداگانه (I2C و SPI) استفاده شود. - چگونه نویز دادهها را کاهش دهیم؟
با فیلتر دیجیتال، استفاده از خازن کنار VCC، و کابلکشی صحیح میتوان نویز را کاهش داد. - آیا برای خواندن دادهها نیاز به RTOS داریم؟
خیر، ولی در پروژههای پیچیدهتر استفاده از FreeRTOS توصیه میشود. - آیا امکان استفاده از Bluetooth برای ارسال دادهها وجود دارد؟
بله، با ماژولهایی مانند HC-05 میتوان دادههای سنسور را بیسیم ارسال کرد.
با راهاندازی موفق MPU6050 و LSM6DS3، دنیایی از پروژههای هوشمند پیش روی شماست: ساخت پهپاد، ربات تعادلی، کنترلر حرکتی برای بازی، سیستمهای هشدار سقوط و غیره. STM32 ابزار قدرتمندی است که با درک صحیح دادههای حرکتی، به شما امکان میدهد تا مرزهای نوآوری را جابجا کنید.
اگر این مقاله اموزش راه اندازی سنسور ژیروسکوپ و شتاب سنج MPU6050 و LSM6DS3 با میکروکنترلر STM32 برای شما مفید بود، آن را با دوستان خود به اشتراک بگذارید و برای مشاهده آموزشهای بیشتر به سایت ما سر بزنید.
مطلب پیشنهادی
آموزش راه اندازی ارتباط بلوتوث Bluetooth با میکروکنترلر STM32
0
دیدگاههای محترمانه: لطفاً نظرات خود را با رعایت احترام به دیگران و به صورت محترمانه ارسال کنید. از بهکار بردن زبان توهینآمیز، تهدیدآمیز یا نژادپرستانه خودداری کنید.
حفظ حریم خصوصی: از درج اطلاعات شخصی خود یا دیگران مانند شماره تماس، آدرس و هرگونه اطلاعات حساس خودداری کنید.
محتوای تبلیغاتی: ارسال دیدگاههای تبلیغاتی، لینکهای خارجی یا هر نوع محتوای تجاری که مرتبط با موضوع نباشد، ممنوع است.
موافقت با قوانین: با ارسال دیدگاه خود، شما تأیید میکنید که قوانین فوق را خوانده و با آنها موافقید. تیم ما حق دارد نظرات غیرمجاز را حذف کند.
پروژه های پیشنهادی
پروژه ریموت کنترل کدلرن حرفه ای
مشاهده پروژهپروژه ساعت کنترل زمان بندی رله با اردوینو
مشاهده پروژهپروژه قفل دیجیتال با ماژول RFID RC522
مشاهده پروژه