0 محصولات
نمایش سبد خرید
راه اندازی و تست ماژول MPU6050
در این آموزش از ساخت پروژه نحوه تست و راه اندازی ماژول MPU6050 با اردوینو را اموزش خواهیم داد. ماژول MPU6050 یکی از پر کاربرد ترین ماژول های ژیروسکوپ و شتاب سنج 3 محوره هست و ارتباط این ماژول از طریق پروتکل i2c با اردوینو بر قرار میشه
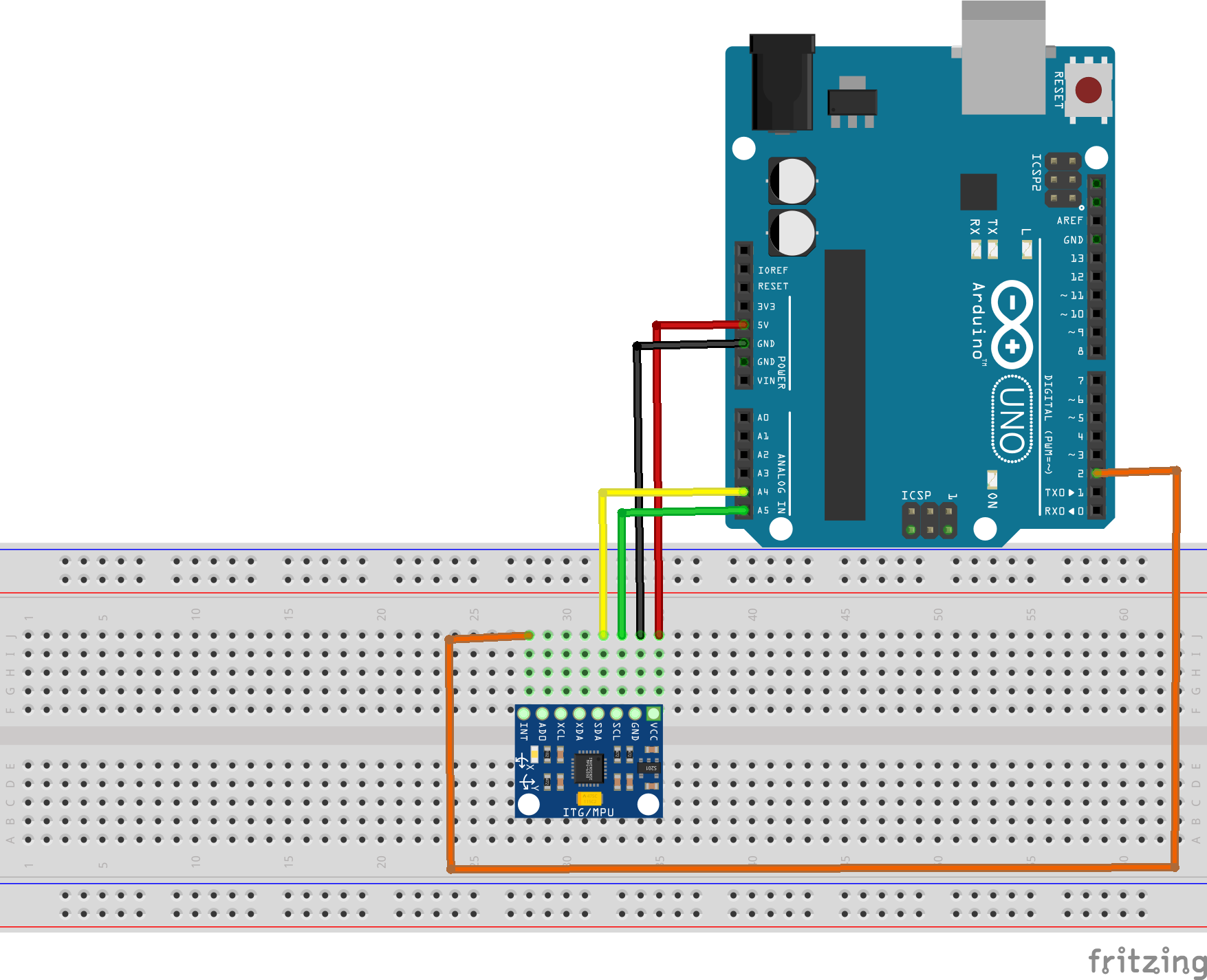
شماتیک تست mpu6050
SCL ماژول mpu6050 به پایه A5 اردوینو
SDA ماژول mpu6050 به پایه A4 اردوینو
INT ماژول mpu6050 به پایه 2 اردوینو
VCC ماژول به پایه 5V اردوینو
GND ماژول به پایه GND اردوینو
کد تست ماژول MPU6050
برای تست ماژول کد های زیر رو کپی و در نرم افزار پیست کنید و روی اردوینو اپلود کنید
#include <Wire.h>
const int MPU = 0x68;
float AccX, AccY, AccZ;
float GyroX, GyroY, GyroZ;
float accAngleX, accAngleY, gyroAngleX, gyroAngleY, gyroAngleZ;
float roll, pitch, yaw;
float AccErrorX, AccErrorY, GyroErrorX, GyroErrorY, GyroErrorZ;
float elapsedTime, currentTime, previousTime;
int c = 0;
void setup() {
Serial.begin(19200);
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B);
Wire.write(0x00);
Wire.endTransmission(true);
calculate_IMU_error();
delay(20);
}
void loop() {
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0;
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0;
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0;
accAngleX = (atan(AccY / sqrt(pow(AccX, 2) + pow(AccZ, 2))) * 180 / PI) - 0.58;
accAngleY = (atan(-1 * AccX / sqrt(pow(AccY, 2) + pow(AccZ, 2))) * 180 / PI) + 1.58;
previousTime = currentTime;
currentTime = millis();
elapsedTime = (currentTime - previousTime) / 1000;
Wire.beginTransmission(MPU);
Wire.write(0x43);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
GyroX = (Wire.read() << 8 | Wire.read()) / 131.0;
GyroY = (Wire.read() << 8 | Wire.read()) / 131.0;
GyroZ = (Wire.read() << 8 | Wire.read()) / 131.0;
// Correct the outputs with the calculated error values
GyroX = GyroX + 0.56; // GyroErrorX ~(-0.56)
GyroY = GyroY - 2; // GyroErrorY ~(2)
GyroZ = GyroZ + 0.79; // GyroErrorZ ~ (-0.8)
gyroAngleX = gyroAngleX + GyroX * elapsedTime; // deg/s * s = deg
gyroAngleY = gyroAngleY + GyroY * elapsedTime;
yaw = yaw + GyroZ * elapsedTime;
roll = 0.96 * gyroAngleX + 0.04 * accAngleX;
pitch = 0.96 * gyroAngleY + 0.04 * accAngleY;
// Print the values on the serial monitor
Serial.print(roll);
Serial.print("/");
Serial.print(pitch);
Serial.print("/");
Serial.println(yaw);
}
void calculate_IMU_error() {
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
// Sum all readings
AccErrorX = AccErrorX + ((atan((AccY) / sqrt(pow((AccX), 2) + pow((AccZ), 2))) * 180 / PI));
AccErrorY = AccErrorY + ((atan(-1 * (AccX) / sqrt(pow((AccY), 2) + pow((AccZ), 2))) * 180 / PI));
c++;
}
AccErrorX = AccErrorX / 200;
AccErrorY = AccErrorY / 200;
c = 0;
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x43);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
GyroX = Wire.read() << 8 | Wire.read();
GyroY = Wire.read() << 8 | Wire.read();
GyroZ = Wire.read() << 8 | Wire.read();
// Sum all readings
GyroErrorX = GyroErrorX + (GyroX / 131.0);
GyroErrorY = GyroErrorY + (GyroY / 131.0);
GyroErrorZ = GyroErrorZ + (GyroZ / 131.0);
c++;
}
GyroErrorX = GyroErrorX / 200;
GyroErrorY = GyroErrorY / 200;
GyroErrorZ = GyroErrorZ / 200;
Serial.print("AccErrorX: ");
Serial.println(AccErrorX);
Serial.print("AccErrorY: ");
Serial.println(AccErrorY);
Serial.print("GyroErrorX: ");
Serial.println(GyroErrorX);
Serial.print("GyroErrorY: ");
Serial.println(GyroErrorY);
Serial.print("GyroErrorZ: ");
Serial.println(GyroErrorZ);
}بعد از اپلود کد ، سریال مانیتور رو باز کنید و سرعت روی 19200 قرار دهید در صورتی که ماژول سالم باشه و با تغییر موقعیت ماژول در محور های x , y مدل مقادیر نیز تغییر می کند.
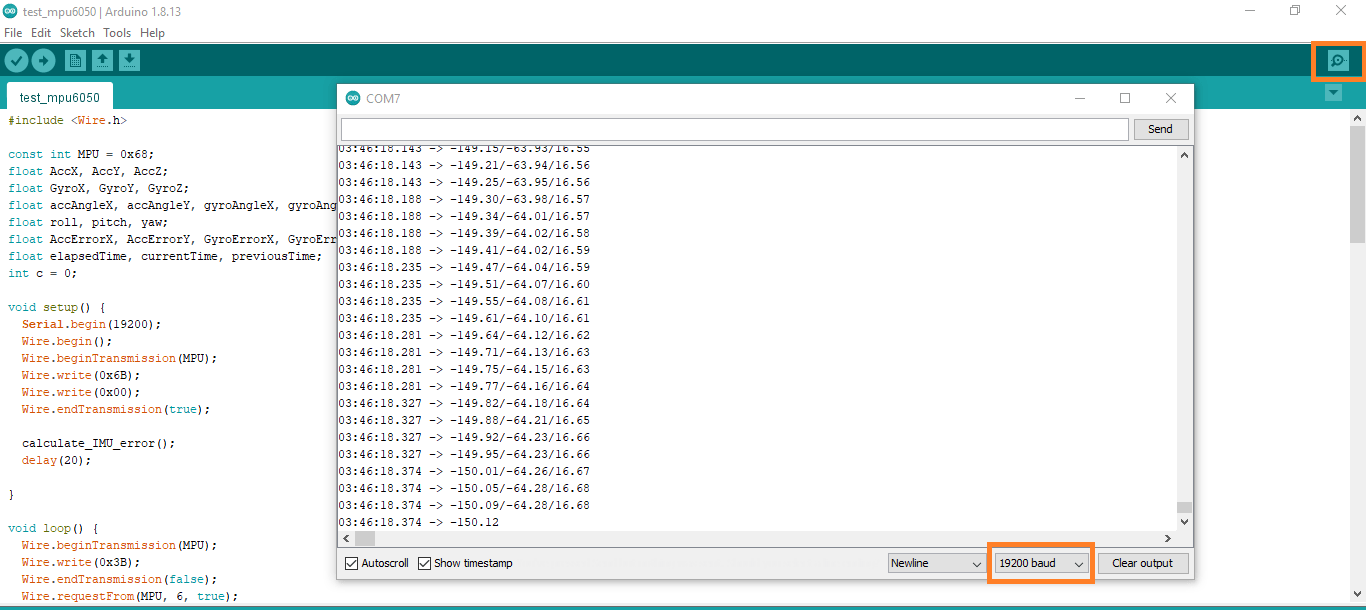
امیدوار که مطالب راه اندازی و تست ماژول MPU6050 برایتان مفید بوده باشه
0
دیدگاههای محترمانه: لطفاً نظرات خود را با رعایت احترام به دیگران و به صورت محترمانه ارسال کنید. از بهکار بردن زبان توهینآمیز، تهدیدآمیز یا نژادپرستانه خودداری کنید.
حفظ حریم خصوصی: از درج اطلاعات شخصی خود یا دیگران مانند شماره تماس، آدرس و هرگونه اطلاعات حساس خودداری کنید.
محتوای تبلیغاتی: ارسال دیدگاههای تبلیغاتی، لینکهای خارجی یا هر نوع محتوای تجاری که مرتبط با موضوع نباشد، ممنوع است.
موافقت با قوانین: با ارسال دیدگاه خود، شما تأیید میکنید که قوانین فوق را خوانده و با آنها موافقید. تیم ما حق دارد نظرات غیرمجاز را حذف کند.
پروژه های پیشنهادی
پروژه ریموت کنترل کدلرن حرفه ای
مشاهده پروژهپروژه ساعت کنترل زمان بندی رله با اردوینو
مشاهده پروژهپروژه قفل دیجیتال با ماژول RFID RC522
مشاهده پروژه